
Page 113 - DCAP506_ARTIFICIAL_INTELLIGENCE
P. 113
Unit 8: Statistical Reasoning
planes or an ellipse for a plane and a sphere, and project this onto our focal plane. Now we have Notes
our hypothesized intersections in the same dimension as our extracted lines from the beginning
stage. So we now locate, for every intersecting line a closest match line from our line list. Once
we have located the closest matching line we produce a probability from the error. So a line that
closely matches our intersection line then we have a high probability while two surfaces that
don’t intersect in the object are unlikely to correspond with a line from the line list thus providing
us a low probability. The line that is found is also verified to see if it appears in an area of
uncertainty. If it does then that is another strong evidence that the line that we have found is
really where surfaces are attached.
So once we have produced this network with all the essential links etc. any more information
that is given to the system can be added and the network will broadcast this information
throughout the network in the form of probability updating. So for example say a new image
was offered from say a colour image and this image increased the possibility of some edges and
corners being present in the image then this would increase the probability of those traits that
are linked to those edges and corners which would propagate all through the network.
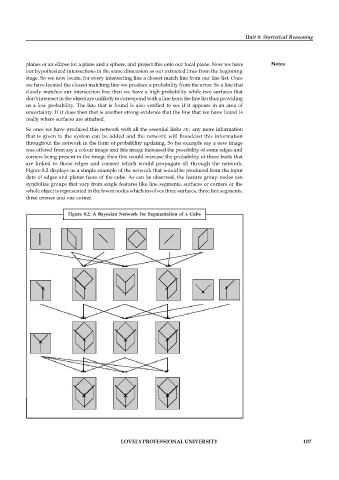
Figure 8.2 displays us a simple example of the network that would be produced from the input
data of edges and planar faces of the cube. As can be observed, the feature group nodes can
symbolize groups that vary from single features like line segments, surfaces or corners or the
whole object is represented in the lower nodes which involves three surfaces, three line segments,
three crosses and one corner.
Figure 8.2: A Bayesian Network for Segmentation of a Cube
LOVELY PROFESSIONAL UNIVERSITY 107