
Page 187 - DCAP507_SYSTEM_SOFTWARE
P. 187
Unit 11: Programming Languages Concept (II)
Notes
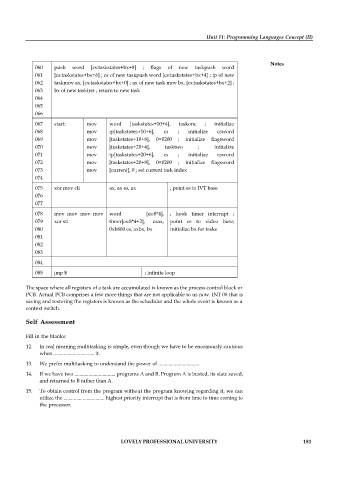
060 push word [cs:taskstates+bx+8] ; flags of new taskpush word
061 [cs:taskstates+bx+6] ; cs of new taskpush word [cs:taskstates+bx+4] ; ip of new
062 taskmov ax, [cs:taskstates+bx+0] ; ax of new task mov bx, [cs:taskstates+bx+2] ;
063 bx of new taskiret ; return to new task
064
065
066
067 start: mov word [taskstates+10+4], taskone ; initialize
068 mov ip[taskstates+10+6], cs ; initialize csword
069 mov [taskstates+10+8], 0×0200 ; initialize flagsword
070 mov [taskstates+20+4], tasktwo ; initialize
071 mov ip[taskstates+20+6], cs ; initialize csword
072 mov [taskstates+20+8], 0×0200 ; initialize flagsword
073 mov [current], 0 ; set current task index
074
075 xor mov cli ax, ax es, ax ; point es to IVT base
076
077
078 mov mov mov mov word [es:8*4], ; hook timer interrupt ;
079 xor sti timer[es:8*4+2], csax, point es to video base;
080 0xb800 es, axbx, bx initialize bx for tasks
081
082
083
084
085 jmp $ ; infinite loop
The space where all registers of a task are accumulated is known as the process control block or
PCB. Actual PCB comprises a few more things that are not applicable to us now. INT 08 that is
saving and restoring the registers is known as the scheduler and the whole event is known as a
context switch.
Self Assessment
Fill in the blanks:
12. In real meaning multitasking is simple, even though we have to be enormously cautious
when ................................ it.
13. We prefer multitasking to understand the power of ................................
14. If we have two ................................ programs A and B. Program A is busted, its state saved,
and returned to B rather than A.
15. To obtain control from the program without the program knowing regarding it, we can
utilize the ................................ highest priority interrupt that is from time to time coming to
the processor.
LOVELY PROFESSIONAL UNIVERSITY 181